TEMA-2 MÀQUINES I MECANISMES
1. MÀQUINES
És un conjunt de mecanismes, amb moviments coordinats, que transforma una forma d’energia en treball útil o en un altre tipus d’energia.
Les màquines poden facilitar la realització de treball suplint o multiplicant l'esforç humà.
Les màquines poden facilitar la realització de treball suplint o multiplicant l'esforç humà.
CLASSIFICACIÓ DE LES MÀQUINES
MÀQUINES SIMPLES: dispositius senzills amb un o dos elements que només requereixen d'una força per funcionar. S'utilitzen per multiplicar forces o moviment.


Un arc és una màquina simple
MÀQUINES COMPLEXES: transformen l’energia d’entrada, que pot provenir de la natura o d’algun combustible, en energia mecànica o altres energies. En general, parlem de màquines motrius.

Una excavadora és una màquina complexa.

Una excavadora és una màquina complexa.
PARTS DE LES MÀQUINES
L'ESTRUCTURA: on es fixen les altres parts:
EL MOTOR: peça fonamental que transforma l'energia.
DISPOSITIUS DE CONTROL
MECANISMES: transmeten la fora i el moviment.
EL MOTOR: peça fonamental que transforma l'energia.
DISPOSITIUS DE CONTROL
MECANISMES: transmeten la fora i el moviment.
1.1 MÀQUINES SIMPLES
LA PALANCA
És una barra rígida capaç de girar al voltant d'un punt de suport o fulcre, té com a funció multiplicar l'efecte de la força.
Sempre té una força aplicada, el fulcre o punt de suport i la resistència o càrrega.
Hi ha tres tipus de palanca:
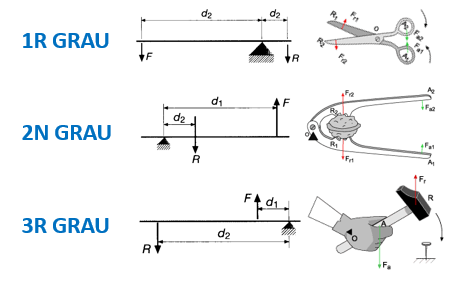
Quan volem saber la resistència, el punt d'aplicació o la força fem servir una fórmula. És la següent anomenada llei de la palanca:
F·d1=R·d2
F=Força
R=Resistència
d1: longitud braç de força
d2: longitud braç de resistència
Les seves aplicacions són moltes: el transport de càrregues amb carros, la politja, la roda hidràulica, el torn, la roda de molí, etc.
Sempre té una força aplicada, el fulcre o punt de suport i la resistència o càrrega.
Hi ha tres tipus de palanca:

Quan volem saber la resistència, el punt d'aplicació o la força fem servir una fórmula. És la següent anomenada llei de la palanca:
F·d1=R·d2
F=Força
R=Resistència
d1: longitud braç de força
d2: longitud braç de resistència
LA RODA
-LA POLITJA
És una roda que té la superfície central en forma de canal per la qual es fa passar una corda. El principi del funcionament és una palanca de primer grau.
F=R
 LA POLITJA
LA POLITJA
Ja que aquesta màquina simple és còmode però no amplifica la força, per això existeix una politja mòbil.
F=R

Ja que aquesta màquina simple és còmode però no amplifica la força, per això existeix una politja mòbil.
-EL POLISPAST
Està format per politges fixes i politges mòbils. Per calcular la força és fa servir aquesta fórmula.
F=R/2n
F=Força
R=Resistència
n: nº de politges mòbils
Per calcular la longitud de la corda estirada es fa servir un fórmula a partir de la llei de la palanca.
F·l1=R·l2
l1= longitud de la corda estirada
l2= alçada que puja la càrrega

EL POLISPAST
F=R/2n
F=Força
R=Resistència
n: nº de politges mòbils
Per calcular la longitud de la corda estirada es fa servir un fórmula a partir de la llei de la palanca.
F·l1=R·l2
l1= longitud de la corda estirada
l2= alçada que puja la càrrega

EL PLA INCLINAT
És una rampa que permet elevar càrregues, fent menys força que si ho féssim de manera vertical.
F=R·h/L
F=Força
R=Resistència
h: alçada
L: Longitud del pla
-EL CARGOL (una aplicació del pla inclinat)
Quan s'aplica una força i es cargola, es multiplica la força aplicada. Els filets (formen la rosca) disminueixen l'esforç.
Si el treball és el mateix:
F=R·h/L
F=Força
R=Resistència
h: alçada
L: Longitud del pla
-EL CARGOL (una aplicació del pla inclinat)
Quan s'aplica una força i es cargola, es multiplica la força aplicada. Els filets (formen la rosca) disminueixen l'esforç.
F·2·3'14=R·p
F=Força
R=Resistència
p: nº de passos de rosca



PER ENGRANATGES (dels tres tipus: helicoïdals, rectes o cònics)
PER MECANISMES DE CON ESCALONAT



F=Força
R=Resistència
p: nº de passos de rosca
2. MECANISMES
Un mecanisme és un conjunt de peces que fan funcions de guiatge, transformació i transmissió del moviment relacionat amb les forces que actuen en una màquina.
SISTEMES DE TRANSMISSIÓ DE MOVIMENT
Mecanisme capaç de transportar el moviment des del punt d'on el generen fins el punt que el punt d'aplicació.

Els sistemes més importants són:
⇒ ENGRANATGES: roden amb sentits contraris.
⇒ POLITGES/CORRETGES: transmeten moviment sense canviar de sentit.
⇒ RODES DE FRICCIÓ: roden amb sentits contraris.
⇒ TRANSMISSIÓ PER CADENA: transmeten moviment sense canviar de sentit.

ELEMENTS D'UNA TRANSMISSIÓ
⇒ RODA MOTRIU: està connectada al motor.
⇒ RODA CONDUÏDA: rep el moviment.

TIPUS DE TRANSMISSIONS
⇒ MULTIPLICADOR: la velocitat de la roda conduïda augmenta.
⇒ RODA CONDUÏDA: la velocitat de la roda conduïda disminueix
RELACIÓ DE TRANSMISSIÓ
i=n1/n2
i=relació de transmissió
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
La velocitat es calcula en rpm (revolucions per minut).
CÀLCUL DE TRANSMISSIONS SIMPLES
PER RODES, POLITGES, FRICCIÓ,..
n1·d1=n2·d2
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
d1= diàmetre de la roda motriu
d2= diàmetre de la roda conduïda
n1·z1=n2·z2
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
z1= número de dents de la roda motriu
z2= número de dents de la roda conduïda
PER MECANISMES DE CON ESCALONAT
Un mecanisme de con escalonat de politges és un sistema de transmissió format per un grup de politges ordenades per la mida del diàmetre (de més gran a més petit) i muntades en un eix (eix motriu), que estan enfrontades a un altre grup de politges idèntic col·locat en posició inversa
n1·d1=n2·d2
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
d1= diàmetre de la roda motriu
d2= diàmetre de la roda conduïda

CÀLCUL DE TRANSMISSIONS COMPOSTES
Una cadena de transmissió d'un cotxe (és un exemple de transmissió composta).
PER RODES, POLITGES, FRICCIÓ,...
n1/nN=d2·d4... dn/d1·d3... dn
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
d1= diàmetre 1
d2= diàmetre 2
d3= diàmetre 3
d4= diàmetre 4
PER ENGRANATGES
n1/nN=z2·z4... zn/z1·z3... zn
n1= velocitat de la roda motriu
n2= velocitat de la roda conduïda
z1= nº de dents roda 1
z2= nº de dents roda 2
z3= nº de dents roda 3
z4= nº de dents roda 4
MÀQUINES O INVENTS RESPECTUOSOS AMB EL MEDI AMBIENT
ELS COTXES ELÈCTRICS: són respectuosos amb el medi ambient ja que no emeten gasos contaminants a l'atmosfera.

LES PERSIANES AMB PLAQUES SOLARS: són respectuoses ja que aporten energia a la casa a partir de fonts d'energia natural.